文中神经元编码可查阅:
线虫样本名称可查阅:
Python 代码下载地址:
编译:集智翻译组
来源:
原题:Caenorhabditis elegans and the network control framework - FAQs

秀丽隐杆线虫是一种无毒无害、可以独立生存的线虫,其体内302个神经元细胞的连接方式已经被揭示出来。由 Barabási 率领的研究小组,用 Python 代码实现了对秀丽隐杆线虫神经网络的模拟控制,研究成果近期公布在 上。以下是该研究成果的翻译。
摘要
对于任何神经系统的功能运作来说,控制都是至关重要的。决定大脑中连接的,是在多个层级进行持续控制、保持关键内部变量的稳定性、以及在对环境刺激反应下产生特定行为的需求。对完整描述神经系统所需的多种不同数据集进行统一为观察到的结构和功能关系提供机制上的解释网络控制的研究范式是一个有潜力的预测性的、量化的框架。
我们从理论,计算和实验三个方面介绍网络控制
简介
如何处理庞大的数据量,将不同的信息类型(如精确的神经元形态和基因图谱)整合并联系在一起,以及如何建立易于实验验证的假设和预测必须开发新的工具几乎肯定必须跨越传统的学科边界
探索大脑在正常状态下是如何控制行为的,以及阐明促进这一现象所需的结构
线虫的运动反应目标控制问题为网络控制原理在真实系统中的实用性提供了第一个可证伪的实验证据发现了在运动中此前未知的神经元功能使更广泛的,跨学科的读者更容易上手

本文中讨论的问题分为以下五个组:
(i)理论框架,也就是网络控制框架;
(ii)应用于线虫的模型假设;
(iii)计算与实验上的细节,包括分析所用的 Python 代码实现链接;
(iv)目前框架可以改进的地方;
(v)将此框架泛化到更多行为与生物体上,以及其他对未来的展望。
1. 网络控制框架
1.1 如何将目标控制框架应用于线虫运动?
目标控制问题该行为由感觉神经元所受的刺激(输入节点的控制信号)驱动,接着由连接组(控制系统)进行处理,最后导致肌肉收缩与松弛,以生成运动(输出节点的状态)(见图 1)
可控性(controllability)水平最终到达肌肉的线性独立控制信号的数量在电脑模拟中系统地移除神经元或神经元种类,再查明哪些肌肉细胞收到的独立信号会因此而减少可以通过对于特定细胞进行激光消融以及线虫跟踪的实验来检验
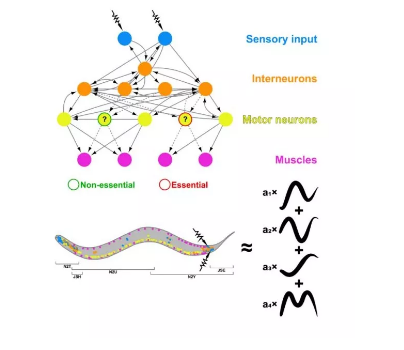
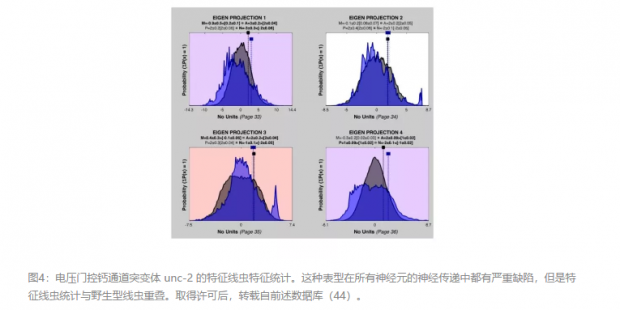
图1:通过网络控制方法理解线虫行为反应。提出的控制框架图示,改编自(4)。根据应激运动反应情况下的结构可控性来说,如果一个神经元被移除后破坏了肌肉的可控性,我们将其标为对于运动来说“重要”,而如果不破坏可控性,我们则将其标为“不重要”。为了进行这种评估,我们首先将秀丽隐杆线虫反应性运动行为映射为目标网络控制问题,提出的问题是对于感觉神经元(蓝色)能够在什么程度上控制肌肉(粉色)。这使我们能够预测 PDB 在线虫运动中此前未知的参与,以及 DD 神经元类型中单个神经元之间功能上的差异。我们通过细胞特异性激光消融和线虫跟踪实验来测试我们的预测,并在统计学上比较特征线虫的特征。 (21)中的原始 EM 图像由五个部分线虫重建而成——主要是 N2U 和 JSE(雌雄同体成虫),前神经环来源于 N2T(雌雄同体成虫),N2U 和 JSE 之间的部分来源于 N2Y(雄性成虫),最后使用 JSH(L4 幼虫)以检查神经环中的连通性。改编自(64)和(4)。
线虫通过背腹弯曲以正弦方式移动。其 95 个菱形体壁肌肉细胞在四个象限(背左/右和腹侧左/右)交错排列,每个肌肉细胞接受来自 75 个运动神经元中部分细胞的多个输入。相应的肌肉以相互的方式收缩和松弛(例如对于背侧弯曲,背侧肌肉细胞收缩,而其腹侧对应的细胞松弛),且运动要求这些波形沿着动物的身长以正确的方向依次传播到邻近的肌肉细胞。为了保持运动,需要在收缩状态和松弛状态之间保持振荡。运动回路的结构对于实现这些基本要求至关重要。运动神经元本身接收来自“命令”中间神经元的输入,这构成了一个双稳态电路,根据感觉神经元的输入决定运动的方向(综述:(65-67))。
1.2 控制框架与其他基于网络的预测工具相比有何不同?
基于一些网络属性来对神经元进行排名缺乏客观的评判标准详尽的、整合了神经元动力学的模型;终能够使我们对神经回路产生重要的洞见控制的方法,处于两者之间不要求对于所有神经元动力学特征的细节都一清二楚找到对于控制来说有重要作用的神经元找到在连接上相似的神经元之间的差异
1.3 当控制理论预测特定神经元失去控制时,我们会观察到什么?
通过肌肉接收的线性独立控制信号的数量来量化可控性可以独立移动的肌肉的数量如果神经元的消融减少了到达肌肉的控制信号的数量,那么我们预计蠕虫精细控制运动的能力会降低在没有该神经元的情况下,网络失去了对肌肉的一定程度的控制丧失可控性并不意味着丧失活性:对少量肌肉的可控性的损失仅意味着神经系统不再能够独立控制这些肌肉,对于它们的控制之间必须具有一定的相关性
受到影响的肌细胞却是服从一定的概率分布的控制问题可以有多种解(30),每种解都可达到相似的可控性通过记录每个独立的解决方案,我们可以知道哪些肌肉的控制更可能减少在不同的解决方案中进行空间共定位
2. 模型假设
2.1 我们可以考虑不同连接类型对网络控制的影响吗?
神经元连接可以是:(i)抑制性或兴奋性的; (ii)加权的,而且可以是在结构或功能的意义上; (iii)化学突触或电突触; (iv)突触的(有线)或突触外的(无线)。
抑制性与兴奋性。兴奋性突触被描述为一个带正号的连接,抑制性突触则带负号结构可控性并不对于连接的正负符号做任何假设只有当我们想要以特定方式控制网络的时候才会变得重要
加权。控制能量控制时间。
化学突触和电突触这些差异对于连接性的影响会在网络层面体现出来在化学突触中,突触前细胞中的电信号转化为化学信号(神经递质的释放),然后在响应细胞(神经元或肌肉)中通过突触后控制离子通道的神经递质受体再次转化为电信号尽管存在一些非线性,化学突触的性质可以通过我们控制框架中的矩阵表达进行合理的拟合
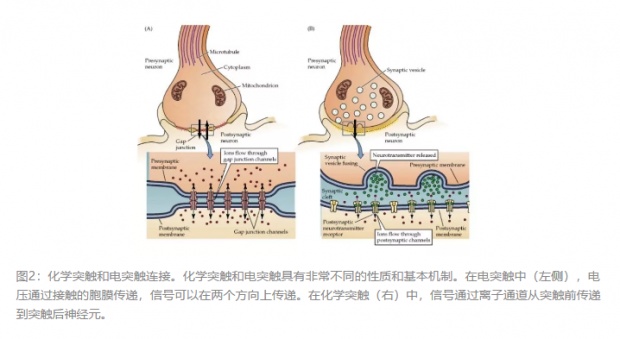
电突触是耦合细胞之间电流可以流动的通道在我们的控制框架的矩阵表达中的模拟,相较于化学突触来说,没有那么完善,在传输信号的能力上也受到更多限制不对称的
我们将所有突触连接看作是相同的,并且使用两个有向连接(每个方向一个)来表示一个无向的电突触使我们高估真正连接组中的结构可控性
有线与无线神经元还使用单胺和多肽等神经调质,以突触外连接(无线)的方式向彼此发送信号我们没有考虑到这种神经调节交互
目前还没有这样的映射这种方法在将来或许是可行的
2.2 我们可以使用线性动力学来描述高度非线性大脑的控制原理吗?
神经元动力学本质上是非线性的了解网络连接图在控制中的作用线性动态能够为该目的提供有用的近似值低维不同的吸引子(极限环或不动点)之间的转变局部可控性在不动点上或极限环沿线的动力学方程
如果一个系统在状态空间中沿着特定轨迹(例如这里的极限环)是局部可控的,那么相应的非线性系统在相同的轨迹上也是可控的模拟实验表明,具有不同连接权重的结构模块的非线性可控性,与其相应的线性和结构可控性表现出了相同的特性
在(4)中我们假设变化仅发生在连接权重中,而矩阵 A 中由线虫连接组编码而成的结构则是恒定的应用独立于连接权重的结构可控性
2.3 个体神经元动力学以及由此产生的自循环在可控性中起什么作用?
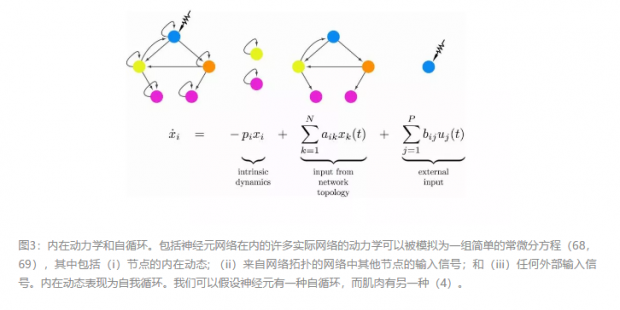
神经元具有内在的动力学节点上的自循环据称,每个节点上都有一个自循环的网络,在结构上都是可控的这是在相同的单个信号直接施加到每个节点的特定条件下推导出来的只有少数感觉神经元接收给定的刺激,因此并非所有节点都会接收到相同的外部信号三种不同的自我循环假设:
(i)所有节点的动力学相同,自循环也相同;
(ii)神经元有一种自我循环,而肌肉有另一种;
(iii)无论组成部分是什么类型,所有节点都有不同的自循环。
如果每个节点具有相同的非零自循环,就像在(i)中那样,那么网络的可控性可以用(1,4,2)中导出的最大匹配框架来估计对于线虫连接组的目标可控性,不需要假设每个节点的自循环都是一样的,可以放宽到情况(ii)第三个情况(iii)最接近现实
3. 计算和实验细节
3.1 分析如何在计算中实现?
我们已将(4)中的控制分析所用到的代码以 Python 脚本的形式公开,获取地址为 它能够重现控制分析中被预测到会参与对于后部与前部轻微触摸作出运动反应的神经元种类
3.2 什么是特征线虫,我们如何使用它们来检测可控性的降低?
线虫在运动过程中采用的形状空间是低维的,仅四个维度便占形状变化的95%紧凑的,相对无偏差的运动表征,以便寻找表型并没有直接衡量 95 个肌肉中每一个细胞的运动动态一些肌肉群中的异常情况比起其他的肌肉群来说可能会更容易探测到
4. 潜在的改进
4.1 连接数据可能不准确——它如何影响分析?
(21)为连接组映射所作的非凡努力在 30 年后仍然无可媲美,并持续为线虫研究提供新的见解(4,25)。这个非常特殊的数据集显然是卓越的,然而,它自然也并不完美。EM 部分是由五个部分线虫重建出的——主要是 N2U 和 JSE(雌雄同体成虫),然后前神经环是 N2T (雌雄同体成虫),N2U 和 JSE 之间的部分是 N2Y(雄性成虫),最后由 JSH(L4 幼虫)以检查神经环中的连通性——参见图1。虽然连接性被广泛假设为是确定性的,且在个体之间几乎没有变化,但它不太可能完全相同。
这些问题——不仅仅是个体差异,而且还有年龄和性别的不同,加上任何映射方法上不可避免的追踪错误,都会导致得到的数据集中可能包含许多错误的、或不可重现的元素。鉴于这些影响因素,不可靠性的程度难以量化,并且可预想会包括缺失连接,额外连接,错误标记的连接以及神经元之间连接类型和数量的错误。尽管存在这些问题,现有的连接图对于多样的用途和调查路线来说显然是无价的(4,23,25)。基于控制的预测的准确性为其适用性提供了另一份证据。
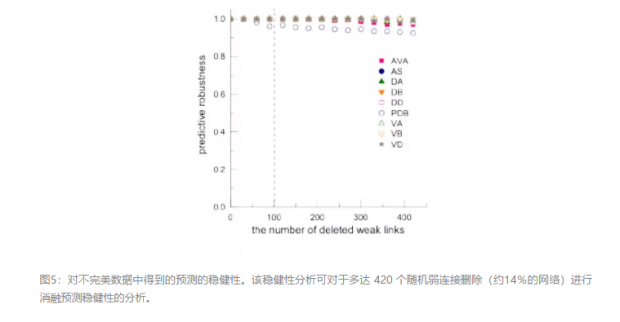
我们使用稳健性(robustness,或译为“鲁棒性”)分析(4)对于其充分性进行了测试,发现即使当用于建模的数据与实际连接组结构相比存在差异,控制框架的预测也是一致且稳健的。在这里,我们扩展了原始论文中的分析结果,发现在对于 420 个随机弱连接删除的情况下预测仍然是稳健的——参见图 5。我们可以删除网络中多达 14% 的弱连接,并重连或添加多达 3% 的连接,然后仍然得到我们之前的预测,这也反映了线虫使用了一个稳健的控制框架——也就是说,即使考虑到连通性模式细节上的高度变化,它的连接仍然能够保持可控性。
线虫身体后部的一小部分从未被重建。 Beth Chen 的论文(2007)包含了最完整的腹侧线重建(DD 间神经元突触所在位置)以及背索的简单模型(DD NMJs)。具体而言,这项工作重建了腹侧线中许多缺失的连接,其中包括一些通过原始 N2U 蠕虫的薄切片而重建的新 EM 图像。至于神经-肌肉间隙连接,原文中的描述是“(45)详细描述了头部前 32 块肌肉中的神经元-肌肉连接。而剩余的肌肉,目前没有可用的神经元-肌肉直接映射。
在这种情况下,如果给定肌肉中神经肌肉间隙连接与肌节区重叠,我们就假设运动神经元与肌肉之间有连接……对于缺乏完整重建的神经元,尤其是线虫背侧的神经元,我们假设神经元-肌肉连接的数量是完整重建的同类型线虫中每个肌肉中平均的 NMJ 数量。”然而,仍然有许多突触是丢失的,这促使我们对于这是否会影响可控性预测提出疑问。(4)中大部分的预测来自于神经肌肉连接,而(23)中的预估则是基于观察或推测出的肌肉臂位置和相应的运动神经元处理过程,所以这些都可能是相当接近真实情况的。
然而,缺失的连通性数据也确实可能会导致不完整,或甚至是不正确的预测。已有的一些工作试图通过分析多个运动回路中重复出现的模式来推测连接,并已经生成了一个概率性模型,这在未来的分析中可以作为对于连通性的估计(46,47)。在(4)中我们使用了当前被领域所接受的的黄金标准数据集,但我们的确希望在接下来的几年中能够有可用的经过改进的数据,包括能够填补目前的不足的更加完整的数据。
4.2 如果从网络中排除电突触,控制预测会发生什么情况?
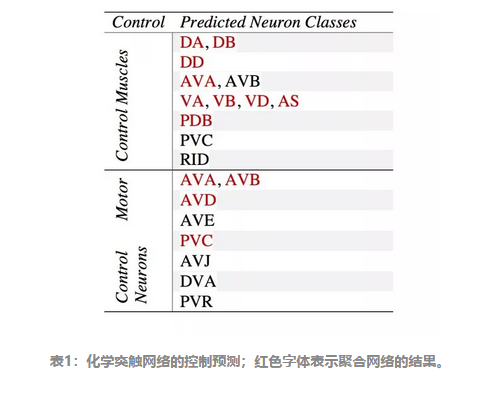
化学突触相比电突触能够被更好地模拟我们在只考虑化学突触,而忽略所有电突触的情况下重新分析了网络变得更加稀疏识别出了一些额外的被预测为会影响可控性的神经元与神经元类别得以重现所有基于聚合网络(红色字体)的原始预测使得仅有突触的网络更能反映运动控制,也很适合目前的设置
5. 未来前景
5.1 控制框架是否可以泛化到其他行为?
它可以用于分析任何行为的基础,只要这些行为可以被描述为对已知输入和输出节点中对于刺激(输入)的响应(输出)
将完成某个特定控制任务所需的时间与能量计入分析如果我们假设短时间就能够达到的较低能量状态相比其他状态来说更优,那么这些时间上与能量上的考量,也就能够帮助我们阐明为什么实现的是一些行为状态而不是另一些需要包括每个连接与自循环的权重和抑制/兴奋性。对于这些信息,目前还没有可用的数据。
一个行为在不同的时间点可能涉及到不同的感觉神经元集,或者不同的连接强度时间控制框架问题输入节点,输出节点,甚至网络结构本身都有可能随时间而改变完全可控性问题目标可控性开放性的,但并非难以解决的
5.2 控制框架是否可泛化到其他生物体?
不要求对于系统有特定的了解,因此它并不限于秀丽隐杆线虫仅仅是连接组数据的可用性、完整性和准确性控制框架可以应用于中等或大规模的分辨率,这一方法此前已取得一定成功子回路——在全脑意义上不完整,但当考虑特定神经回路时完整的数据——可以作为更小的独立系统来研究先前的稳健性分析表明,面对不完善或不完整的数据,我们仍然可以从控制框架中收集到重要的洞察
讨论和展望
可以以优越的能力找到一组在运动中起到重要作用的神经元或神经元类型;但这一清单并不完整被模型识别出对可控性有影响的神经元,的确更可能影响真实行为,而且在一些情况下(例如 PDB 和后部 DD 神经元)这些预测在因果检验中不会被预料到
按照经典惯例,消融实验通常以连接性中明显的特征作为指引——RIV 只在腹侧头部肌肉处有大量突触,所以预期会影响到转弯时的腹侧偏差,而且也确实观察到了这一现象(61)。在(4)中控制框架作出的一些预测不那么直观——我们表明了 PDB 与 RIV 有类似的消融表型,而它位于尾部,尽管具有不对称连接的表征,突触数量却非常少。因此,它对于 omega turn 的腹侧偏差的影响更加出人意料。同样地,尽管 DD 神经元类型被预期在前向和后向运动中发挥作用(49),控制框架得到的预测是单个背侧 DD 神经元比前部神经元更加重要,这也是非常出乎意料的。
这些在线虫上的工作为我们提供了一些线索,让我们知道哪些方法成功的可能性不大从目标控制的角度建立我们的问题,并将肌肉细胞做为输出节点包括在我们的网络中精确地制定控制问题脑网络的其他特征与特性会变得更加重要如何将它们融合到框架中将会是一个重要的挑战
改进新的数据集功能数据计算控制能量和控制时间所需连接的权重乃至抑制/兴奋性的正负标志
翻译:Esther青子
审校:Limitless.Fantasy
编辑:wanting
论文地址:

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}